Waveguide power handling capability is the primary indicator for the selection of microwave systems.
Exceeding the power limit causes breakdown discharge inside the waveguide, leading to system failure.
| Continuous Wave (CW) Power | Peak Power | Breakdown Limit | Cooling |
|---|---|---|---|
| Sustained thermal and electrical limits | Instantaneous electric-field limit | Gas, pressure, geometry, and surface-condition limit | Heat-removal method and thermal margin |
This article analyzes core concepts from an engineering practice perspective.
Table of Contents
Continuous Wave Power and Peak Power
What is Continuous Wave (CW) Power
Continuous Wave (CW) power is the maximum power a waveguide assembly can transmit continuously without exceeding its specified thermal or electrical limits.
The signal remains applied with a nearly constant amplitude, so the conductor surfaces, joints, windows, and any dielectric supports experience sustained heating.
CW capability is normally stated as an absolute power value, such as kW, for defined frequency, material, geometry, cooling, ambient temperature, pressure, and component conditions. The waveguide must remain within its allowable temperature rise and electrical limits.
- I once participated in a waveguide feed design project for an X-band satellite ground station where the system required 5 kW of continuous transmission power.
- For that design, the selected WR-90 assembly was treated as having an approximately 2.5 kW CW limit under its specified frequency, cooling, and environmental conditions.
- To meet the 5 kW CW requirement, we used a two-way waveguide power-divider arrangement to keep each path below 2.5 kW and added forced-air heat sinks at the waveguide bends.
- CW power is also closely related to the frequency range of the waveguide.
- For WR-90, 8.2 GHz and 12.4 GHz are the usual operating-band edges. The CW rating does not automatically fall by 20% to 30% at the upper edge; conductor loss, field distribution, flanges, bends, windows, surface finish, and cooling all affect the usable rating.
- When selecting a waveguide, do not rely on the model number alone. Check the validated power rating or power curve at the actual operating frequency and under the intended environmental and cooling conditions.
What is Peak Power
Peak power is the maximum instantaneous power that a waveguide can withstand in a pulsed signal state, which is fundamentally different from CW power.
The focus of peak power is not on thermal accumulation, but on whether the electric field strength exceeds the breakdown threshold of the dielectric inside the waveguide.
With short pulses and a low duty cycle, allowable peak power can be much higher than CW power, sometimes by one or two orders of magnitude. The actual ratio is not universal and must come from a validated component rating or test.
- I encountered a peak power issue during the TR component testing of a military phased array radar.
- The system operated in the Ku-band and required 50 kW pulse peak power, while the CW rating used for the selected waveguide assembly was 3 kW.
- From a CW perspective, 50 kW is far above the 3 kW rating. With a 0.5 μs pulse width and a 1 kHz repetition frequency, the duty cycle is 0.05% and the average pulse power is 25 W; however, low average power alone does not prove peak-power safety, so the 50 kW pulse must still be checked against breakdown and component limits.
- The engineering limitations of peak power are also related to the electric field distribution inside the waveguide.
- In a rectangular waveguide operating in the dominant TE10 mode, the electric-field magnitude is highest around the center of the broad wall dimension. Local field enhancement at discontinuities can therefore increase breakdown risk.
- In high-pulse systems, the wide side dimension of the waveguide and the surface finish of the inner surface are key factors affecting the peak power rating.
- A shorter pulse can allow a higher peak rating in some designs, but the relationship is not unlimited. Pressure, gas type, gap geometry, pulse duration, surface condition, and Paschen-type gas-breakdown behavior all matter.
The Importance of Duty Cycle
The duty cycle is the bridge connecting CW power and peak power, and it is also the parameter most easily misused in waveguide power selection.
The duty cycle is the pulse width (τ) divided by the pulse repetition period (T): Duty Cycle (%) = (τ / T) × 100% = τ × PRR × 100%, with τ and PRR expressed in compatible units.
The duty cycle directly affects the thermal accumulation effect inside the waveguide, which in turn determines the actual available power.
- When reviewing the technical proposal of a communication equipment supplier, I found that their understanding of the duty cycle was flawed.
- The proposal required 100 kW peak power at a PRR of 2 kHz and a pulse width of 2 μs. The duty cycle is 0.4%, and the proposal claimed that the result could be calculated only by distributing CW power.
- At a 0.4% duty cycle, the average pulse power is 400 W. Thermal loading may be much lower than the peak value suggests, but both the 400 W average thermal load and the 100 kW peak breakdown limit still need to be checked.
- When the duty cycle is below 1%, thermal loading may be reduced, but it cannot be ignored automatically. Loss, pulse repetition rate, pulse train duration, cooling, and local thermal time constants still affect the result.
Another common misconception is that “a low duty cycle means peak power can be increased arbitrarily”.
- In reality, there is an absolute upper limit for peak power — the breakdown threshold of the waveguide at standard atmospheric pressure.
- Duty cycle is used to calculate average pulse power and evaluate thermal loading. Peak electric-field stress must still be checked separately against the breakdown limit.
- There is no universal rule that limits peak power to three times CW power at 10% duty cycle or allows ten times CW power at 1%. The acceptable ratio depends on average loss, pulse conditions, breakdown margin, component geometry, and validated test data.
Breakdown Limits
Fundamentals of Voltage Breakdown
Voltage breakdown occurs when a gas or dielectric loses its insulating behavior under a sufficiently strong electric field and a conductive discharge path forms.
In waveguide systems, breakdown can cause strong reflection and signal loss, and it can damage inner surfaces, windows, transitions, or connector structures.
Understanding the basic theory of voltage breakdown is fundamental to grasping the power limits of waveguides.
For a uniform gas gap, Paschen’s law relates breakdown voltage to pressure multiplied by gap distance (p·d): V_b = B·p·d / [ln(A·p·d) − ln(ln(1 + 1/γ_se))], where A and B are gas constants and γ_se is the secondary-electron emission coefficient.
Near standard atmospheric pressure, dry air in a reasonably uniform gap is often approximated at about 3 kV/mm. A real waveguide assembly can break down at a lower local field because sharp edges, gaps, contamination, moisture, and discontinuities concentrate the electric field.
- I once encountered a waveguide discharge accident while commissioning a Ka-band ground station.
- The system experienced frequent discharge alarms after a sudden rise in humidity during rainy weather, initially suspected to be a radome sealing issue.
- The investigation indicated that humidity, possible condensation, and surface contamination had reduced the local breakdown margin and promoted discharge.
- Waveguide breakdown is not a single-parameter issue but a result of the combined effects of multiple environmental factors such as pressure, temperature, humidity, and cleanliness.
- In practical engineering, empirical formulas or experimental data are usually used to estimate the breakdown limit, rather than pure theoretical calculations.
Altitude Derating
Altitude Derating is an environmental correction factor that must be considered in waveguide power selection.
As altitude increases, atmospheric pressure decreases, and so does the breakdown threshold inside the waveguide.
Atmospheric pressure falls nonlinearly with altitude, so there is no fixed 12% pressure drop or universal 10% to 15% power derating for every 1,000 meters. The correction must use the actual pressure and the validated breakdown behavior of the assembly.
- I once selected a waveguide feedline for a radar station at an altitude of 4,200 meters. The equipment supplier’s technical data was based on sea-level conditions.
- The initial selection directly adopted the power rating for low altitude, resulting in frequent discharge alarms during the commissioning phase.
- Using a standard-atmosphere estimate, pressure at 4,200 meters is about 60.1 kPa, or about 451 Torr, compared with about 760 Torr at sea level. This is roughly 41% lower pressure, but the breakdown-power change is not necessarily the same percentage because Paschen behavior is nonlinear.
- After correction, we adopted a pressurized waveguide solution and successfully resolved the issue.
- Engineering calculations for altitude correction usually employ empirical formulas or standard charts.
- MIL-DTL-3922 covers general-purpose waveguide flanges and does not provide universal altitude power-derating factors. Altitude correction should use standard-atmosphere data, manufacturer curves, validated analysis, or pressure-altitude testing for the actual assembly.
- It is particularly important to note that in high-altitude environments above 3000 meters, even if the CW power is much lower than the manual rating, breakdown may still occur—because the breakdown threshold is more sensitive to pressure than to thermal limits.
- In high-altitude applications, a pressurized waveguide is often considered when the unpressurized breakdown margin is insufficient, but it is not automatically mandatory for every system.
The Role of Pressurized Waveguides
Pressurized waveguides can increase breakdown margin by filling a sealed waveguide with dry air or nitrogen at a controlled pressure above the ambient pressure. The selected pressure must remain within the rated working pressure of the complete assembly.
The core parameters of the pressurization system are the air-tightness index and the maintenance pressure value.
- I participated in the design of a waveguide pressurization system for a C-band broadcast satellite uplink station.
- The station is located in a coastal area, where high humidity and salt spray in summer pose a severe challenge to the sealing performance of the waveguide.
- We equipped each waveguide section with inflation and venting ports, an automatic pressure-maintenance device, and a humidity alarm. The system used 100 kPa gauge pressure because the complete assembly had been designed and pressure-rated for that level.
- This system operated continuously in the high-humidity coastal environment for 8 years without a single waveguide discharge fault.
- In contrast, another similar device in the same area that did not use a pressurized waveguide experienced an average of 3 to 4 discharge shutdown incidents per year.
- The design points include leak tightness, gas dryness, working pressure, relief protection, and monitoring. A helium leak rate of ≤1 × 10⁻⁸ Pa·m³/s is a very stringent project-specific criterion rather than a universal waveguide requirement; a dew point of ≤−40°C is a common dry-gas target when specified; and operating pressure must remain within the assembly rating rather than follow a universal 50% to 70% rule.
Altitude above 3,000 meters or sustained humidity above 80% may justify pressurization, drying, sealing, or environmental control, but no single altitude or humidity value makes pressurization mandatory in every design.
Cooling
Air Cooling Basics
Air cooling is the most common method for waveguide heat dissipation, divided into natural convection cooling and forced air cooling.
| Natural Convection | Forced Air |
|---|---|
| Natural convection uses the temperature difference between the waveguide surface and the surrounding air to move heat without a fan. It may suit some low-loss assemblies below roughly 500 W CW or intermittent service, but 500 W is not a universal limit. | Forced-air cooling uses a fan to increase convective heat transfer. It can raise the usable CW rating, but a 50% to 100% increase is design-specific and must be verified by thermal analysis or test. |
- When designing the waveguide feed system for an L-band primary radar, I initially attempted a natural convection cooling solution.
- The system had 800 W CW power, about 12 meters of waveguide, and a maximum ambient temperature of 45°C.
- Theoretical calculations showed that the temperature rise inside the waveguide would reach 80°C under natural convection, exceeding the maximum allowable temperature of the PTFE support pads.
- After switching to forced air cooling, the thermal resistance of the same structure was reduced by about 60%, and the internal wall temperature rise was controlled within 35°C.
- This experience shows that the choice of air cooling method must be based on thermal calculations rather than empirical estimates.
- Engineering design for air cooling also needs to consider protection against dust and contaminants.
- In sandy or industrial atmospheres, forced air cooling can introduce particles into the waveguide, accumulating on the flange sealing surfaces and dielectric supports, affecting air tightness and electrical performance.
- In such environments, filters should typically be installed at the air inlet and maintained regularly.
- Filter selection should follow the current project specification and the ISO 16890 ePM classification where applicable. Under the older EN 779 system, an F7 filter was generally associated with about 80% to 90% average efficiency at 0.4 μm, not a guaranteed efficiency of at least 90%.
Liquid Cooling Methods
Liquid cooling is commonly used for high-loss or high-power waveguide systems, often in multi-kilowatt service. There is no universal 10 kW changeover point or fixed claim that liquid cooling provides 10 to 20 times the capacity of air cooling.
Liquid cooling circulates a coolant (typically deionized water or specialized heat transfer oil) through a cooling jacket around the waveguide, quickly removing heat from the waveguide’s inner wall.
The design key for a liquid cooling system lies in the contact thermal resistance of the cooling jacket, the coolant flow rate, and the temperature control precision.
- I was involved in the design of a microwave transmission system for an ITER-related project where the transmission line carried 170 GHz millimeter waves at continuous or long-pulse power above 500 kW; ITER-class systems are designed around the megawatt level.
- This power level exceeded the practical capability of air cooling for that design, so we adopted water-cooled corrugated waveguide components and cooling structures.
- The cooling-water flow rate reached 40 L/min, the inlet-to-outlet temperature difference was controlled within 15°C, and the system operated stably under the specified continuous conditions.
- Another advantage of liquid cooling is its high temperature control precision.
- By adjusting the coolant temperature, the waveguide operating temperature can be maintained close to the ambient temperature or a set value, avoiding the impact of temperature fluctuations on transmission performance.
- In precision radar or phased-array systems, temperature changes can cause phase drift. A liquid-cooling system with temperature sensors and closed-loop control can hold fluctuations within ±0.5°C when the complete thermal-control system is designed for that tolerance.
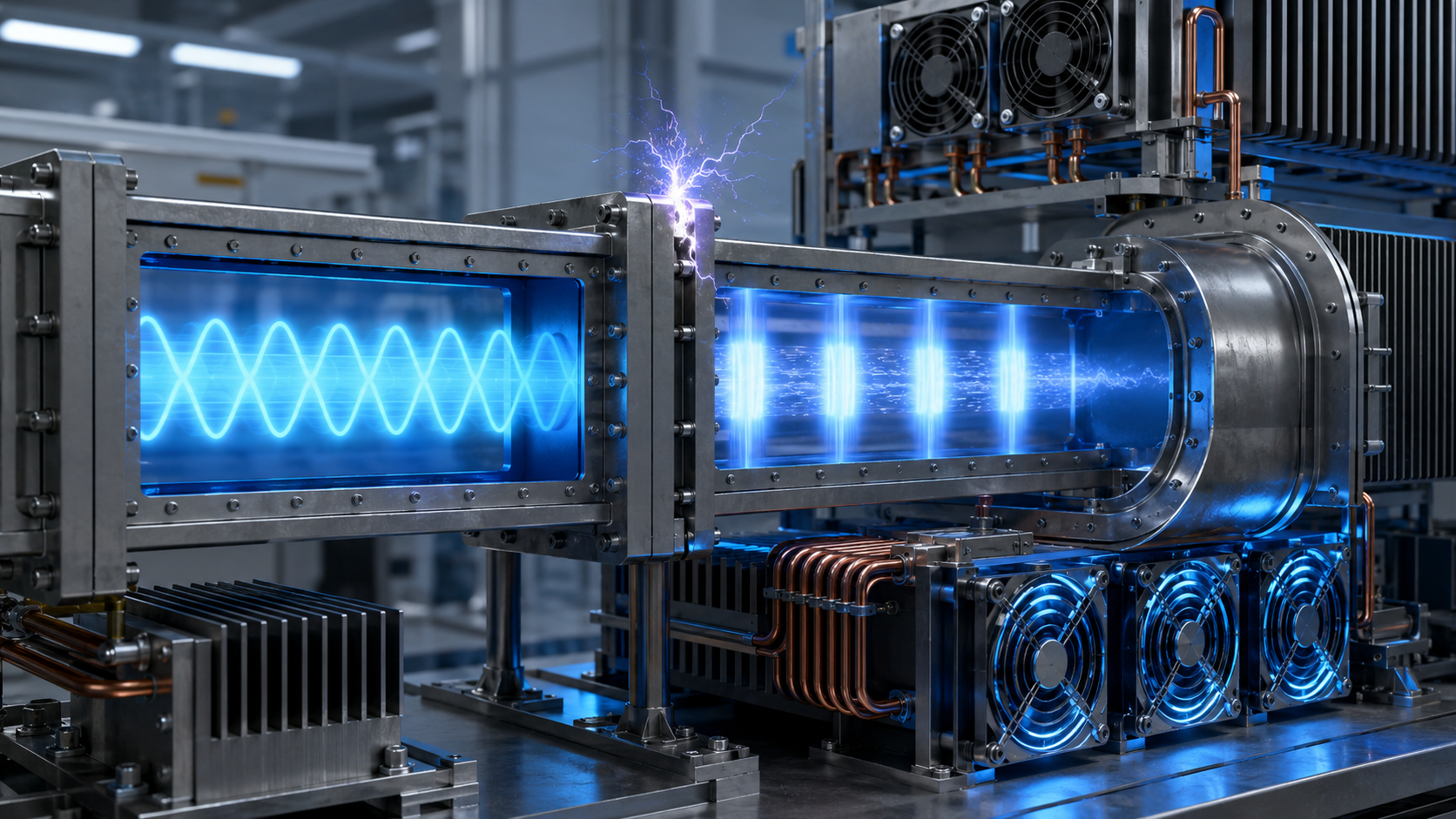
- For high-power industrial microwave applications (such as plasma heating), liquid cooling systems typically require dedicated heat exchangers and purification devices to maintain long-term cooling stability.
Choosing the Right Cooling Method
The choice of cooling method is a crucial decision point in waveguide system design, requiring comprehensive consideration of power level, operating mode, environmental conditions, and maintenance costs.
There is no “best” cooling method, only the “most appropriate” choice.
- I once provided selection advice for two systems with similar power levels (CW 5kW) but different application scenarios.
- The first was a Ku-band power divider network for a fixed ground station, with good environmental conditions, and a forced air cooling solution was adopted. After 5 years of operation, the fans were replaced twice, and the maintenance cost was controllable.
- The second was a shipborne phased array radar, where the salt spray and high vibration environment made air cooling reliability insufficient. Eventually, a sealed liquid cooling solution was chosen. The initial investment was higher, but there were no cooling-related failures within 10 years.
- As a starting point, natural or forced-air cooling may suit some systems below 1 kW, forced air may be practical from about 1 kW to 10 kW, and liquid cooling may be needed above 10 kW or at a high duty cycle. These are screening ranges, not fixed design limits.
- In humid, dusty, or corrosive environments, a sealed cooling arrangement may be preferred, but liquid cooling should not be selected solely from the environment or regardless of power level.
- It is recommended to conduct complete thermal simulation modeling during selection, including waveguide inner wall temperature rise estimation and heat dissipation surface thermal resistance calculation.
- Waveguide power selection must simultaneously meet the CW thermal limit, peak breakdown limit, and altitude correction constraints.
- For high-altitude, high-humidity, or high-power applications, evaluate pressurization and liquid cooling where the calculated margins require them, and perform power-verification tests after installation.
The choice of cooling method is a crucial decision point in waveguide system design, requiring comprehensive consideration of power level, operating mode, environmental conditions, and maintenance costs.
There is no “best” cooling method, only the “most appropriate” choice.
- I once provided selection advice for two systems with similar power levels (CW 5kW) but different application scenarios.
- The first was a Ku-band power divider network for a fixed ground station, with good environmental conditions, and a forced air cooling solution was adopted.
- The second was a shipborne phased array radar, where the salt spray and high vibration environment made air cooling reliability insufficient, and a sealed liquid cooling solution was eventually chosen.
- As a starting point, natural or forced-air cooling may suit some systems below 1 kW, forced air may be practical from about 1 kW to 10 kW, and liquid cooling may be needed above 10 kW or at a high duty cycle. These are screening ranges, not fixed design limits.
- In humid, dusty, or corrosive environments, a sealed cooling arrangement may be preferred, but liquid cooling should not be selected solely from the environment or regardless of power level.
- It is recommended to conduct complete thermal simulation modeling during selection, including waveguide inner wall temperature rise estimation and heat dissipation surface thermal resistance calculation.
- Waveguide power selection must simultaneously meet the CW thermal limit, peak breakdown limit, and altitude correction constraints.
- For high-altitude, high-humidity, or high-power applications, evaluate pressurization and liquid cooling where the calculated margins require them, and perform power-verification tests after installation.