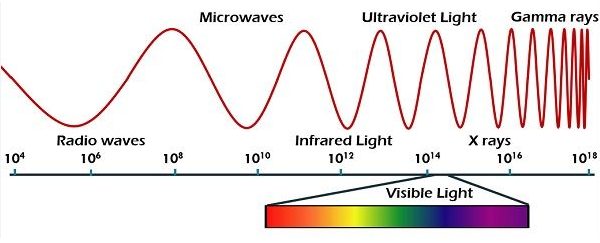
คลื่นวิทยุทั้ง 7 ย่านความถี่ครอบคลุมตั้งแต่ ELF (3-30Hz, การสื่อสารในเรือดำน้ำ), SLF (30-300Hz, ใต้ดิน), ULF (300-3kHz, ธรณีฟิสิกส์), VLF (3-30kHz, ทุ่นสัญญาณนำทาง), LF (30-300kHz, AM), MF (300-3MHz, AM), HF (3-30MHz, คลื่นสั้น) ซึ่งแต่ละย่านมีลักษณะการแพร่กระจายคลื่นที่แตกต่างกันสำหรับการใช้งานเฉพาะด้าน
Table of Contents
คลื่นวิทยุในการแพร่ภาพกระจายเสียง
ปัจจุบันมี สถานีวิทยุที่ได้รับอนุญาตมากกว่า 44,000 แห่ง ทั่วโลก โดยมี ย่านความถี่ AM (530–1700 kHz) และ ย่านความถี่ FM (88–108 MHz) เป็นแกนหลัก ความแตกต่างที่สำคัญคือวิธีการจัดการกับสัญญาณรบกวน AM (Amplitude Modulation) จะเปลี่ยนความแรงของสัญญาณ ทำให้ไวต่อเสียงรบกวนจากฟ้าผ่าหรือเครื่องใช้ไฟฟ้า แต่สามารถเดินทางได้ไกลอย่างเหลือเชื่อ โดยเฉพาะในตอนกลางคืน มักจะไกลเกิน 100 ไมล์ ส่วน FM (Frequency Modulation) จะเปลี่ยนความถี่ของสัญญาณ ทำให้ไม่มีเสียงรบกวนที่เกิดจากการเปลี่ยนแปลงความแรง ส่งผลให้ เสียงสเตอริโอมีความคมชัดสูง เหมาะสำหรับดนตรี แม้ว่า ระยะการส่งสัญญาณปกติจะจำกัดอยู่ที่ประมาณ 50-60 ไมล์ ก็ตาม
ในสหรัฐอเมริกา FCC จะประมูลใบอนุญาตเหล่านี้ ใบอนุญาต FM เพียงใบเดียวในเขตเมืองใหญ่อาจมีราคาสูงถึงหลายล้านดอลลาร์ สถานีต่างๆ ทำงานด้วยระดับพลังงานที่แตกต่างกันมาก สถานี AM ท้องถิ่นขนาดเล็กอาจออกอากาศที่ 250 วัตต์ ครอบคลุมพื้นที่เมือง ขณะที่ สถานี AM ช่องสัญญาณชัดเจน (Clear-channel) เช่น WOR 710 kHz ในนิวยอร์ก สามารถใช้กำลังไฟถึง 50,000 วัตต์ ซึ่งครอบคลุมหลายรัฐในตอนกลางคืน ทั้งนี้เนื่องจากสัญญาณ AM แพร่กระจายผ่านคลื่นดิน (Ground Waves) ในตอนกลางวันและสะท้อนชั้นบรรยากาศไอโอโนสเฟียร์ในตอนกลางคืน ช่วยขยายระยะการส่งสัญญาณ ส่วนสัญญาณ FM ซึ่งมีความถี่สูงกว่า จะเดินทางในแนวสายตา (Line-of-sight) เป็นหลัก นี่คือเหตุผลที่ เสาอากาศ FM มักติดตั้งบนหอคอยที่สูงกว่า 1,000 ฟุต เพื่อเพิ่มขอบเขตทัศนวิสัยให้สูงสุด
HD Radio ซึ่งพบได้ทั่วไปในอเมริกา ช่วยให้สถานีสามารถส่ง ช่องสัญญาณย่อยเพิ่มเติมได้สูงสุด 3 ช่อง ในความถี่เดิม ตัวอย่างเช่น สถานีหลักที่ 98.5 MHz ยังสามารถเสนอช่องร็อกคลาสสิกที่ 98.5 HD2 และช่องข่าวที่ 98.5 HD3 ได้ โดยทั้งหมดมี คุณภาพเสียงใกล้เคียงกับแผ่นซีดีที่อัตราบิต 96–128 kbps อย่างไรก็ตาม สิ่งนี้ต้องใช้เงินลงทุนสูง: เครื่องส่ง HD Radio ใหม่เครื่องหนึ่งอาจมีราคาตั้งแต่ 50,000 ถึง 150,000 ดอลลาร์ รวมถึงค่าใช้จ่ายต่อเนื่องสำหรับ ค่าธรรมเนียมใบอนุญาตเพิ่มเติม
| คุณสมบัติ | การแพร่ภาพ AM | การแพร่ภาพ FM |
|---|---|---|
| ช่วงความถี่ | 530 – 1700 kHz | 88 – 108 MHz |
| การมอดูเลตหลัก | Amplitude (ความแรง) | Frequency (ความถี่) |
| แบนด์วิดท์ปกติ | 10 kHz | 200 kHz |
| ความคมชัดของเสียง | ต่ำ (โมโน, < 5 kHz) | สูง (สเตอริโอ, < 15 kHz) |
| จุดอ่อนสำคัญ | สัญญาณรบกวนทางไฟฟ้า | สิ่งกีดขวางทางกายภาพ |
| ระยะส่งเฉลี่ยกลางวัน | 0–100 ไมล์ | 0–60 ไมล์ |
แม้ว่าสตรีมมิ่งจะเติบโตขึ้น แต่ วิทยุภาคพื้นดินยังคงเข้าถึงประชากรในสหรัฐฯ กว่า 90% ในแต่ละสัปดาห์ ความยืดหยุ่นของมันอยู่ที่ความเรียบง่ายและคุ้มค่า ผู้ฟังต้องการเพียง เครื่องรับราคา 10 ดอลลาร์ และผู้แพร่ภาพกระจายเสียงหลังจากตั้งค่าเริ่มต้นแล้ว สามารถส่งสัญญาณถึง ผู้คนไม่จำกัดจำนวนพร้อมกันได้โดยแทบไม่มีต้นทุนส่วนเพิ่ม ซึ่งเป็นความสามารถในการขยายตัว (Scalability) ที่เครือข่ายข้อมูลยังคงพยายามไล่ตาม เทคโนโลยีนี้อาจมีอายุ เกินศตวรรษ แต่ประสิทธิภาพและการเข้าถึงที่กว้างขวางทำให้มันยังคงเป็นส่วนสำคัญของสื่อสารมวลชน
สัญญาณ Wi-Fi และ Bluetooth
Wi-Fi และ Bluetooth เป็นฟันเฟืองคู่ของการสื่อสารไร้สายระยะสั้นสมัยใหม่ แต่ถูกออกแบบมาเพื่องานที่ต่างกันโดยสิ้นเชิง Wi-Fi เป็นเครื่องมือส่งข้อมูลความเร็วสูงระยะไกลสำหรับงานหนัก ขณะที่ Bluetooth โดดเด่นในการเชื่อมต่อระยะสั้นที่ใช้พลังงานต่ำระหว่างอุปกรณ์ส่วนตัว อย่างไรก็ตาม ทั้งคู่ใช้พื้นที่ร่วมกันคือ ย่านความถี่ ISM 2.4 GHz (อุตสาหกรรม วิทยาศาสตร์ และการแพทย์) ย่านความถี่ที่ไม่ต้องใช้ใบอนุญาตนี้เป็นพื้นที่เสรีระดับโลก ซึ่งเป็นเหตุผลว่าทำไม เราเตอร์ Wi-Fi และ หูฟัง Bluetooth ของคุณอาจถูกรบกวนจากเตาไมโครเวฟ ซึ่งทำงานที่ ประมาณ 2.45 GHz เช่นกัน เพื่อจัดการกับความแออัดนี้ Wi-Fi ได้พัฒนาผ่านหลายรุ่น โดยมาตรฐาน Wi-Fi 6E ล่าสุดได้เพิ่มย่านความถี่ 6 GHz ที่บริสุทธิ์ ซึ่งให้ สเปกตรัมเพิ่มเติมถึง 1,200 MHz เพื่อหลีกเลี่ยงรถติดในย่าน 2.4 GHz ในทางกลับกัน Bluetooth ใช้เทคนิคที่เรียกว่า Frequency-hopping spread spectrum (FHSS) โดยจะสลับช่องสัญญาณ 79 ช่องกว้าง 1-MHz ภายในย่านความถี่ 2.4 GHz อย่างรวดเร็วเพื่อหลีกเลี่ยงสัญญาณรบกวนที่คงอยู่
เราเตอร์ Wi-Fi 6 รุ่นใหม่สามารถส่งข้อมูลได้สูงถึง 9.6 Gbps ภายใน ระยะทางในร่มปกติ 30-45 เมตร โดยเชื่อมต่อ อุปกรณ์หลายสิบเครื่อง เข้ากับอินเทอร์เน็ตพร้อมกัน สิ่งนี้ต้องใช้พลังงานสูง โดยเราเตอร์หนึ่งเครื่องอาจใช้ไฟ 6 ถึง 12 วัตต์ ระหว่างทำงาน Bluetooth LE (Low Energy) ซึ่งเป็นมาตรฐานสำหรับอุปกรณ์เสริมส่วนใหญ่ ทำงานในระดับที่ต่างกันอย่างสิ้นเชิง มันถูกออกแบบมาเพื่อ การส่งข้อมูลเป็นระยะ เช่น การส่งค่าการเต้นของหัวใจหรือการกดปุ่ม โดยใช้พลังงาน น้อยกว่า 0.01 วัตต์ ถึง 0.05 วัตต์ ระหว่างการส่งสัญญาณที่ใช้งานอยู่ นี่คือเหตุผลที่ชิป Bluetooth 5.0 ขนาดจิ๋ว สามารถทำงานได้ นานหลายเดือนหรือเป็นปี ด้วย แบตเตอรี่แบบเหรียญ 220mAh ก้อนเดียว ในขณะที่กล้องวงจรปิด Wi-Fi จะใช้แบตเตอรี่ก้อนเดียวกันหมดภายใน เวลาไม่ถึงชั่วโมง
ข้อแตกต่างหลักอยู่ที่วัตถุประสงค์: Wi-Fi มีไว้สำหรับการเข้าถึงอินเทอร์เน็ตความเร็วสูง แทนที่สายแลน (Ethernet) ในขณะที่ Bluetooth เป็น เทคโนโลยีแทนสายเคเบิลพลังงานต่ำ สำหรับอุปกรณ์ต่อพ่วง โดยให้ความสำคัญกับอายุการใช้งานแบตเตอรี่นานหลายปีมากกว่าแบนด์วิดท์มหาศาล
การติดตั้งเครือข่าย Wi-Fi 6 สำหรับบ้านขนาด 2,500 ตารางฟุต อาจต้องใช้ เราเตอร์ราคา 200 ดอลลาร์ และค่าอินเทอร์เน็ตรายเดือน 70 ดอลลาร์ หน้าที่ของมันคือการส่ง สตรีมวิดีโอ 4K ที่เสถียร ซึ่งใช้ข้อมูล มากกว่า 7 GB ต่อชั่วโมง ในทางกลับกัน การจับคู่ หูฟัง Bluetooth ราคา 80 ดอลลาร์ กับโทรศัพท์ไม่มีค่าใช้จ่ายรายเดือน หน้าที่เดียวของหูฟังคือการรับ สตรีมเสียงที่บีบอัดด้วยอัตราบิต 256 kbps ซึ่งเพียงพอสำหรับเพลงคุณภาพสูง ในขณะที่เคสชาร์จมีความ จุแบตเตอรี่รวม 500mAh สำหรับการ เล่นต่อเนื่องนานกว่า 20 ชั่วโมง คุณจะไม่มีวันใช้ Bluetooth เพื่อสตรีมภาพยนตร์ 4K ไปยังทีวี เช่นเดียวกับที่คุณจะไม่ใช้ Wi-Fi เพื่อเชื่อมต่อเมาส์คอมพิวเตอร์ เพราะพลังงานและส่วนหัวของโปรโตคอล (overhead) จะไม่มีประสิทธิภาพอย่างมากสำหรับข้อมูลขนาดเล็กเพียง 1 kB ที่เมาส์ส่งต่อวินาที
ไมโครเวฟอุ่นอาหารได้อย่างไร
กระบวนการนี้อยู่ที่ คลื่นวิทยุ 2.45 GHz ซึ่งเป็นความถี่ที่เลือกมาโดยเฉพาะเพราะโมเลกุลของน้ำดูดซับได้ง่าย แมกนีตรอน (Magnetron) ซึ่งเป็นหัวใจของเตา จะเปลี่ยน ไฟฟ้าในบ้าน 1,200 ถึง 1,500 วัตต์ ให้เป็นคลื่นไมโครเวฟเหล่านี้ คลื่นเหล่านี้ทะลุผ่านอาหาร โดยปกติจะลึกประมาณ 2 ถึง 4 เซนติเมตร และทำให้โมเลกุลของน้ำ ไขมัน และน้ำตาลหมุน 2.45 พันล้านครั้งต่อวินาที การหมุนที่รวดเร็วนี้สร้างแรงเสียดทานระดับโมเลกุล ซึ่งผลิตพลังงานความร้อนในทันที นี่คือเหตุผลที่ ซุปถ้วยขนาด 250 กรัม สามารถเปลี่ยนจากอุณหภูมิ 4°C (ตู้เย็น) เป็น 85°C (ร้อนจัด) ได้ในเวลาประมาณ 90 วินาที ด้วยกำลังไฟสูง ซึ่งเป็นงานที่ต้องใช้เวลามากกว่า 10 นาที บนเตาแบบปกติ
ประสิทธิภาพของการทำความร้อนด้วยไมโครเวฟขึ้นอยู่กับปัจจัยเชิงปริมาณที่สำคัญหลายประการ:
- ปริมาณน้ำ: อาหารที่มีความเข้มข้นของน้ำสูง เช่น ผัก (น้ำ 90-95%) จะร้อนเร็วและสม่ำเสมอกว่าอาหารที่แห้งกว่า เช่น ขนมปัง (น้ำ 35-40%) ซึ่งอาจแข็งและเหนียวได้หากร้อนเกินไป
- มวลและความหนาแน่น: ผักโขมแช่แข็งก้อนขนาด 500 กรัม จะต้องใช้เวลา 6-8 นาที ในการละลายและทำให้ร้อน ขณะที่ผักโขมสดในมวลเท่ากันอาจใช้เวลาเพียง 3-4 นาที เพราะคลื่นสามารถทะลุผ่านช่องว่างอากาศระหว่างใบได้
- อุณหภูมิเริ่มต้น: อาหารที่นำออกมาจากตู้เย็นที่ 4°C ต้องการพลังงานมากกว่าอาหารชนิดเดียวกันที่เริ่มที่อุณหภูมิห้อง (21°C) อย่างมาก พลังงานที่จำเป็นในการเพิ่มอุณหภูมิของ น้ำ 1 กรัมขึ้น 1 องศาเซลเซียส คือ 1 แคลอรี่ และความต้องการนี้จะเพิ่มขึ้นเป็นเส้นตรงตามมวลและความแตกต่างของอุณหภูมิ
ความยาวคลื่น 2.45 GHz คือประมาณ 12.2 เซนติเมตร ซึ่งสามารถสร้างคลื่นนิ่ง (Standing Waves) ภายในตัวเครื่อง สิ่งนี้ทำให้เกิดปัญหาทั่วไปคือจุดร้อนและจุดเย็น เพื่อบรรเทาปัญหานี้ ผู้ผลิตจึงติดตั้งจานหมุนที่เคลื่อนที่ด้วยความเร็ว 4-6 รอบต่อนาที หรือใช้ตัวกระจายโลหะแบบหมุนเพื่อกระจายพลังงานให้สม่ำเสมอยิ่งขึ้น
นอกจากนี้ แมกนีตรอนเองมีประสิทธิภาพเพียง 65-70% ในการเปลี่ยนพลังงานไฟฟ้าเป็นพลังงานไมโครเวฟ ส่วนที่เหลือจะสูญเสียไปเป็นความร้อนเหลือทิ้ง ซึ่งเป็นเหตุผลว่าทำไมภายนอกเตาถึงอุ่นขึ้น และพัดลมภายในต้องใช้ไฟ 15-25 วัตต์ เพื่อระบายความร้อนให้แมกนีตรอนระหว่างทำงาน ถึงกระนั้นก็ยังคงมีประสิทธิภาพมากกว่าเตาอบแบบแผ่ความร้อนแบบดั้งเดิมอย่างมาก ซึ่งอาจเปลี่ยนพลังงานเพียง 15-20% มาทำให้อาหารร้อนจริงๆ ส่วนที่เหลือจะไปทำความร้อนให้กับอากาศและวัสดุของเครื่องแทน ความเร็วและการถ่ายเทพลังงานโดยตรงทำให้ไมโครเวฟเป็นเครื่องมือที่ไม่มีใครเทียบได้สำหรับการทำความร้อนและละลายน้ำแข็งอย่างรวดเร็ว แม้ว่าจะไม่สามารถทำให้เกิดปฏิกิริยาการเปลี่ยนเป็นสีน้ำตาล (ปฏิกิริยา Maillard และ Caramelization) ที่เกิดขึ้นที่อุณหภูมิพื้นผิวสูงกว่า 150°C ได้ ซึ่งจำกัดการใช้งานในการปรุงอาหารแบบจริงๆ จังๆ
GPS สำหรับการติดตามตำแหน่ง
ระบบทำงานผ่านกลุ่มดาวเทียม อย่างน้อย 24 ดวง ที่โคจรอยู่ที่ระดับความสูง 20,180 กิโลเมตร กระจายอยู่ในวงโคจร 6 ระนาบ เพื่อให้แน่ใจว่าจะมี ดาวเทียม 4 ถึง 6 ดวงที่มองเห็นได้จากทุกจุด ในเวลาใดก็ตาม ดาวเทียมแต่ละดวงจะส่งสัญญาณวิทยุอย่างต่อเนื่องซึ่งมีข้อมูลตำแหน่งที่แม่นยำและเวลาที่แน่นอนจาก นาฬิกาอะตอมบนเครื่องที่มีความแม่นยำภายใน 2-3 นาโนวินาที เครื่องรับ GPS ของคุณที่อยู่ในโทรศัพท์หรือรถยนต์จะรับสัญญาณเหล่านี้ ด้วยการคำนวณ การหน่วงเวลา ระหว่างเวลาที่ส่งสัญญาณและเวลาที่รับสัญญาณ (กระบวนการที่ต้องใช้สัญญาณจาก ดาวเทียมอย่างน้อย 4 ดวง) มันสามารถคำนวณตำแหน่งของคุณบนพื้นโลกได้อย่างแม่นยำ ระบบทั้งหมดได้รับทุนสนับสนุนและดูแลโดยรัฐบาลสหรัฐฯ เปิดให้พลเรือนใช้งานได้ฟรี และเป็น โครงสร้างพื้นฐานที่มีมูลค่าหลายพันล้านดอลลาร์ โดยดาวเทียมรุ่นใหม่แต่ละดวงมีราคามากกว่า 500 ล้านดอลลาร์ ในการสร้างและส่งขึ้นสู่อวกาศ
วิทยาศาสตร์เบื้องหลังการคำนวณขึ้นอยู่กับความเร็วคงที่ของแสง (299,792,458 เมตรต่อวินาที) การหน่วงสัญญาณเพียง 1 มิลลิวินาที (0.001 วินาที) จะเปลี่ยนเป็นระยะทางเกือบ 300 กิโลเมตร เพื่อให้ได้ความแม่นยำในระดับเมตร เครื่องรับต้องวัดความแตกต่างของเวลาด้วยความแม่นยำอย่างเหลือเชื่อ ลงไปถึง หลักสิบนาโนวินาที สัญญาณ L1 ของพลเรือนที่ส่งที่ 1575.42 MHz โดยปกติจะให้ ความแม่นยำ 5 ถึง 10 เมตร ภายใต้สภาวะท้องฟ้าเปิด อย่างไรก็ตาม ปัจจัยสำคัญหลายประการอาจทำให้เกิดข้อผิดพลาดและลดความแม่นยำลง:
- การรบกวนของชั้นบรรยากาศ: ชั้นไอโอโนสเฟียร์และโทรโพสเฟียร์ทำให้สัญญาณวิทยุช้าลง เพิ่ม ข้อผิดพลาดประมาณ 5 เมตร เครื่องรับแบบความถี่คู่ที่รับสัญญาณ L2 (1227.60 MHz) สามารถแก้ไขข้อผิดพลาดส่วนใหญ่ในจุดนี้ได้
- รูปทรงทางเรขาคณิตของดาวเทียม: การจัดวางตำแหน่งทางกายภาพของดาวเทียมที่ใช้งาน (เรียกว่า Dilution of Precision หรือ DOP) สามารถขยายข้อผิดพลาดอื่นๆ ได้ ค่า DOP ที่ต่ำ (ต่ำกว่า 3) นั้นเหมาะสมที่สุด ขณะที่ DOP สูง (สูงกว่า 6) สามารถลดความแม่นยำลงเหลือ มากกว่า 15 เมตร
- การสะท้อนของสัญญาณ (Multipath): การสะท้อนจากอาคารหรือภูเขาสามารถเพิ่มเวลาในการเดินทางของสัญญาณ ทำให้เกิด ข้อผิดพลาดประมาณ 1 เมตร ในสภาพแวดล้อมที่เป็นเมือง
- คุณภาพของเครื่องรับ: เครื่อง GPS แบบพกพาเครื่องละ 100 ดอลลาร์ อาจมีเสาอากาศและชิปเซ็ตที่มีคุณภาพสูงกว่าสมาร์ทโฟน ช่วยให้ล็อคสัญญาณได้เร็วขึ้นและรักษาตำแหน่งที่แม่นยำกว่า มักจะอยู่ภายใน 2-3 เมตร
Assisted-GPS (A-GPS) ใช้การเชื่อมต่อเครือข่ายเซลลูลาร์ (ใช้ข้อมูลเพียงไม่กี่ kB) เพื่อดาวน์โหลดข้อมูลวงโคจรดาวเทียม (ephemeris) อย่างรวดเร็ว ช่วยลดเวลาการล็อคตำแหน่งครั้งแรก (Time to First Fix) จาก 45 วินาที เหลือไม่ถึง 5 วินาที ระบบที่ล้ำสมัยกว่านั้นอย่าง Real-Time Kinematic (RTK) GPS ใช้สถานีฐานที่ติดตั้งอยู่กับที่เพื่อส่งข้อมูลแก้ไขให้กับเครื่องรับที่เคลื่อนที่ ทำให้ได้ ความแม่นยำระดับต่ำกว่าเซนติเมตร (10-20 มม.) ในแบบเรียลไทม์ ซึ่งจำเป็นสำหรับการใช้งานอย่างการเกษตรอัตโนมัติและการสำรวจ อย่างไรก็ตาม บริการที่มีความแม่นยำสูงนี้มาพร้อมกับราคาสูง โดยชุด RTK ระดับมืออาชีพมีราคาตั้งแต่ 5,000 ถึง 20,000 ดอลลาร์ ต่อหน่วย ปัจจุบันพลเรือนทั่วไปสัมผัสกับ ความแม่นยำ 1-3 เมตร เป็นประจำ ต้องขอบคุณเครื่องรับสัญญาณหลายย่านความถี่ในสมาร์ทโฟนรุ่นใหม่ที่เข้าถึงกลุ่มดาวเทียมหลายระบบ (GPS, GLONASS, Galileo, BeiDou) ซึ่งเพิ่มจำนวนดาวเทียมที่ใช้งานได้เป็น มากกว่า 50 ดวง และปรับปรุงความน่าเชื่อถือและความแม่นยำในสภาพแวดล้อมที่ท้าทายได้อย่างมหาศาล
กล้องโทรทรรศน์วิทยุในดาราศาสตร์
ความแรงของสัญญาณที่เดินทางมาจากอวกาศห้วงลึกนั้นต่ำอย่างน่าตกใจ โดยมักจะวัดได้ต่ำกว่า 1 อัตโตวัตต์ต่อตารางเมตร (10⁻¹⁸ วัตต์) ซึ่ง อ่อนกว่าสัญญาณจากดาวเทียม GPS กว่าพันล้านเท่า เพื่อตรวจจับการแผ่รังสีที่แผ่วเบาเช่นนี้ กล้องโทรทรรศน์วิทยุจึงต้องมีขนาดใหญ่มาก Five-hundred-meter Aperture Spherical Telescope (FAST) ในประเทศจีน ซึ่งเป็นกล้องโทรทรรศน์วิทยุแบบจานเดี่ยวที่ใหญ่ที่สุดในโลกในปัจจุบัน มีพื้นที่รับสัญญาณเทียบเท่ากับ สนามฟุตบอลมาตรฐาน 30 สนาม ขนาดมหึมานี้ช่วยให้สามารถรวบรวมพลังงานวิทยุได้เพียงพอสำหรับการวิเคราะห์ โดยสำรวจความถี่ตั้งแต่ 70 MHz ถึง 3.0 GHz
พื้นผิวจานได้รับการวิศวกรรมที่แม่นยำด้วย แผงที่มีความแม่นยำของพื้นผิวที่มีค่าเบี่ยงเบน RMS น้อยกว่า 1 มิลลิเมตร เพื่อรวมรังสีความยาวคลื่นยาวได้อย่างสมบูรณ์ คลื่นที่รวมจุดแล้วจะถูกตรวจจับโดย Feedhorn และเครื่องรับที่มีความไวสูง ซึ่งมักจะถูกทำให้เย็นลงถึง อุณหภูมิไครโอเจนิกที่ต่ำถึง 15 เคลวิน (-258°C) เพื่อลดสัญญาณรบกวนทางอิเล็กทรอนิกส์จากความร้อนที่จะไปกลบสัญญาณจักรวาลที่แผ่วเบา ข้อมูลที่ได้รับจะถูกประมวลผลโดยสเปกโตรมิเตอร์ ซึ่งอาจวิเคราะห์ แบนด์วิดท์หลายร้อย MHz โดยแบ่งออกเป็น ช่องความถี่แยกกันหลายล้านช่อง ตัวชี้วัดประสิทธิภาพหลักสำหรับกล้องโทรทรรศน์วิทยุ ได้แก่:
- ความละเอียดเชิงมุม (Angular Resolution): ความสามารถในการแยกแยะรายละเอียดที่เล็กมาก สำหรับจานเดี่ยว จะกำหนดโดยสูตร: ความละเอียด (อาร์กวินาที) ≈ 70 × ความยาวคลื่น (ซม.) / เส้นผ่านศูนย์กลาง (ม.) ซึ่งหมายความว่า จานขนาด 100 เมตร ที่สังเกตการณ์ที่ ความยาวคลื่น 21 ซม. (ปล่อยออกมาจากก๊าซไฮโดรเจน) จะมีความละเอียดเพียง ~150 อาร์กวินาที ซึ่งถือว่าค่อนข้างต่ำ
- พื้นที่เก็บรวบรวม (Collecting Area): สิ่งนี้กำหนดความไวของกล้องโทรทรรศน์ต่อสัญญาณที่แผ่วเบาโดยตรง เส้นผ่านศูนย์กลาง 500 เมตรของ FAST ทำให้มีพื้นที่รวบรวมสัญญาณประมาณ ~196,000 ตารางเมตร
- อุณหภูมิระบบ (System Temperature): การวัดสัญญาณรบกวนรวมในระบบ ทั้งจากท้องฟ้า ชั้นบรรยากาศ และอุปกรณ์อิเล็กทรอนิกส์ ระบบที่ทันสมัยตั้งเป้าอุณหภูมิให้ต่ำถึง 20 เคลวิน
Very Large Array (VLA) ในนิวเม็กซิโก ใช้ เสาอากาศเคลื่อนที่ได้ 27 ต้น แต่ละต้นมี เส้นผ่านศูนย์กลาง 25 เมตร กระจายอยู่บนรางรูปตัว Y ที่มีความยาวถึง ~36 กิโลเมตร ด้วยการรวมสัญญาณเข้าด้วยกัน VLA สามารถสังเคราะห์ความละเอียดที่เทียบเท่ากับจานเดี่ยว กว้าง 36 กิโลเมตร ทำให้ได้รายละเอียดถึง <0.05 อาร์กวินาที ส่วน Square Kilometre Array (SKA) ที่กำลังจะมาถึง ซึ่งจะสร้างในแอฟริกาใต้และออสเตรเลีย จะเป็นหอดูดาววิทยุที่ทรงพลังที่สุดเท่าที่เคยสร้างมา ระยะแรกจะประกอบด้วย จาน 197 ใบ และ เสาอากาศความถี่ต่ำ 130,000 ต้น สร้างพื้นที่รวบรวมสัญญาณรวมประมาณ ~330,000 ตารางเมตร ด้วยต้นทุนโครงการเกิน 2 พันล้านยูโร
| พารามิเตอร์ | จานเดี่ยวขนาดใหญ่ (FAST) | อินเตอร์เฟอโรมิเตอร์หลัก (VLA) | รุ่นถัดไป (SKA ระยะที่ 1) |
|---|---|---|---|
| รูรับแสงที่มีประสิทธิภาพ | 500 เมตร | 36 กิโลเมตร | >100 กิโลเมตร |
| พื้นที่เก็บรวบรวม | ~196,000 ตร.ม. | ~13,000 ตร.ม. | ~330,000 ตร.ม. |
| ความละเอียดเชิงมุม | ~2.9′ (ที่ 1.4 GHz) | <0.05″ (ที่ 43 GHz) | <0.1″ (ที่ 1.4 GHz) |
| งานวิทยาศาสตร์หลัก | การจับเวลาพัลซาร์, การสำรวจไฮโดรเจน | การถ่ายภาพรายละเอียดสูงของกาแล็กซีวิทยุ | รุ่งอรุณของจักรวาล, วิวัฒนาการกาแล็กซี |
หอดูดาวสมัยใหม่ทั่วไปเช่น Atacama Large Millimeter Array (ALMA) สามารถสร้าง ข้อมูลดิบได้ประมาณ 2 เทราไบต์ต่อวัน การประมวลผลข้อมูลเหล่านี้เป็นภาพทางวิทยาศาสตร์ที่ใช้งานได้ต้องใช้ซูเปอร์คอมพิวเตอร์ Correlator ที่ทรงพลังที่สุดในโลก ซึ่งทำการประมวลผลได้ประมาณ ~17 พันล้านล้านครั้งต่อวินาที
การใช้งานทางการแพทย์: การตรวจ MRI
เครื่องสแกนทางคลินิกทั่วไปทำงานที่ความเข้มของสนามแม่เหล็ก 1.5 เทสลา (T) ซึ่งแรงกว่าสนามแม่เหล็กโลกประมาณ 30,000 เท่า แม้ว่าระบบวิจัยระดับไฮเอนด์จะสูงถึง 7.0 T หรือสูงกว่านั้น เมื่ออยู่ในสนามแม่เหล็กนี้ นิวเคลียสของอะตอมไฮโดรเจนจะเรียงตัวตามทิศทางของสนามแม่เหล็ก เครื่องสแกนจะส่ง พัลส์ความถี่วิทยุ (RF) ที่แม่นยำที่ ความถี่เรโซแนนซ์ของโปรตอนเหล่านี้ ซึ่งก็คือ 63.87 MHz สำหรับระบบ 1.5 T ซึ่งจะทำให้โปรตอนหลุดออกจากการเรียงตัวชั่วคราว เมื่อพวกมันกลับสู่สถานะเดิม (กระบวนการที่เรียกว่า Relaxation) พวกมันจะปล่อยสัญญาณ RF อ่อนๆ ออกมาซึ่งตรวจจับได้โดยขดลวดรับสัญญาณเฉพาะทาง แม่เหล็กตัวนำยิ่งยวด ซึ่งหล่อเย็นด้วยฮีเลียมเหลวถึง -269.1°C (4 เคลวิน) เป็นสิ่งจำเป็นในการสร้างสนามแม่เหล็กที่แรงและเสถียรโดยไม่มีความต้านทานไฟฟ้า โดยใช้ไฟ มากกว่า 50 กิโลวัตต์ ระหว่างการทำงาน และต้องเติมสารทำความเย็นมูลค่า 15,000 ดอลลาร์ต่อปี
สัญญาณที่ได้รับจะถูกเข้ารหัสเชิงพื้นที่โดยการสลับ ขดลวดแม่เหล็กเกรเดียนต์ (Gradient coils) อย่างรวดเร็ว ซึ่งจะเพิ่มความแปรปรวนเล็กน้อยในแม่เหล็กหลักในส่วนต่างๆ ของร่างกายที่ความแรง 20-100 mT/m เกรเดียนต์เหล่านี้ขับเคลื่อนโดยแอมพลิฟายเออร์ที่ใช้ กระแสไฟฟ้าหลายร้อยแอมแปร์ ช่วยให้ระบบสามารถระบุตำแหน่งที่มาของแต่ละสัญญาณภายในปริมาตร 3 มิติได้ ข้อมูลดิบที่เรียกว่า k-space จะถูกประมวลผลโดยอัลกอริทึม เช่น Fast Fourier Transform (FFT) เพื่อสร้างภาพตัดขวางที่มีความละเอียดลงไปถึง 0.5 x 0.5 x 2.0 มม. โปรโตคอล การตรวจวินิจฉัยมาตรฐาน ประกอบด้วยหลายลำดับสัญญาณ (เช่น T1-weighted, T2-weighted) โดยแต่ละลำดับใช้เวลา 3 ถึง 8 นาที ในการทำให้เสร็จ ส่งผลให้เวลาการตรวจทั้งหมดอยู่ที่ 30 ถึง 45 นาที สำหรับการศึกษาที่ละเอียด เวลาในการคลายตัวหลักสองแบบคือ T1 (spin-lattice) และ T2 (spin-spin) ถูกวัดเป็นมิลลิวินาทีและแตกต่างกันไปตามเนื้อเยื่อ—น้ำไขสันหลังมี T2 ประมาณ 1500 มิลลิวินาที ขณะที่ เนื้อเยื่อกล้ามเนื้ออยู่ที่ประมาณ 50 มิลลิวินาที ทำให้เกิดความแตกต่างในภาพสุดท้าย
การลงทุนทางการเงินนั้นสูงมาก: เครื่องสแกน MRI 1.5 T ใหม่มีราคาตั้งแต่ 1 ล้านถึง 1.5 ล้านดอลลาร์ ขณะที่ ระบบ 3.0 T อาจเกิน 2.3 ล้านดอลลาร์ โดยการติดตั้งและการเตรียมสถานที่ (รวมถึงการป้องกันแม่เหล็กหนัก 4 ตัน) จะเพิ่มอีก 500,000 ดอลลาร์ ค่าใช้จ่ายในการดำเนินงานอยู่ที่ 200 ถึง 500 ดอลลาร์ต่อชั่วโมง เมื่อคำนึงถึงการระบายความร้อนของแม่เหล็ก พลังงาน และเวลาของเจ้าหน้าที่เทคนิค แม้จะมีราคาสูง แต่ ความละเอียดของคอนทราสต์เนื้อเยื่ออ่อน ที่หาที่เปรียบไม่ได้และการไม่มีรังสีไอออไนซ์ ทำให้มันกลายเป็นมาตรฐานหลักในการวินิจฉัยภาวะต่างๆ เช่น โรคปลอกประสาทเสื่อมแข็ง เอ็นฉีกขาด และเนื้องอกในสมอง โดยมีการตรวจมากกว่า 100 ล้านครั้ง ทั่วโลกในแต่ละปี
การสื่อสารด้วยรีโมทคอนโทรล
รีโมท IR แบบดั้งเดิม เช่น รีโมททีวีของคุณ ใช้ หลอด LED ความยาวคลื่น 940 นาโนเมตร ที่กะพริบเปิดและปิดเพื่อส่งข้อมูล การกดปุ่มแต่ละครั้งจะส่งรหัสเฉพาะ ซึ่งโดยปกติจะเป็น ลำดับดิจิทัล 12-32 บิต ที่ ความถี่มอดูเลต 36-38 kHz การกะพริบด้วยความถี่สูงนี้ใช้เพื่อแยกสัญญาณออกจากแสงรอบข้าง แต่มันต้องการแนวสายตาโดยตรงและมี ระยะส่งปกติเพียง 6-8 เมตร ตัว LED เองใช้พลังงานต่ำมาก โดยปล่อยพลังงาน ประมาณ 15-20 มิลลิวัตต์ เป็นช่วงสั้นๆ นี่คือเหตุผลที่รีโมทเหล่านี้สามารถทำงานได้ เกินหนึ่งปี ด้วย แบตเตอรี่ AAA สองก้อนที่มีความจุรวมประมาณ ~2000 mAh
รีโมท RF ทำงานในย่านความถี่ ISM ที่ไม่ต้องใช้ใบอนุญาต เช่น 315 MHz (พบบ่อยในอเมริกาเหนือ) หรือ 433.92 MHz (พบบ่อยในยุโรป) สัญญาณเหล่านี้สามารถผ่านผนังได้ง่าย ให้ ระยะที่เชื่อถือได้ 20-50 เมตร ในที่พักอาศัย อัตราข้อมูลช้า มักจะอยู่ที่ ~2 kbps เนื่องจากข้อความคำสั่งสั้นมาก มักจะ ต่ำกว่า 100 บิต เพื่อป้องกันการรบกวนและการเข้าถึงโดยไม่ได้รับอนุญาต ระบบ RF สมัยใหม่ เช่น ที่เปิดประตูโรงรถ จะใช้ การเข้ารหัสรหัสแบบหมุน (Rolling code) โปรโตคอลความปลอดภัยนี้จะเปลี่ยนรหัสที่ส่งหลังจากใช้งานทุกครั้ง โดยมี ตัวนับ 24 บิตที่ซิงโครไนซ์กัน ระหว่างรีโมทและเครื่องรับ ทำให้แทบจะเป็นไปไม่ได้เลยที่จะบันทึกสัญญาณมาเล่นซ้ำ กำลังส่งถูกควบคุมให้ต่ำมาก เครื่องส่งสัญญาณที่ เป็นไปตามข้อกำหนดของ FCC ใน ย่านความถี่ 315 MHz จะมี ขีดจำกัดกำลังส่งที่แผ่ออกมา (ERP) อยู่ที่ 1-5 มิลลิวัตต์ เพื่อให้แน่ใจว่าการรบกวนอุปกรณ์อื่นจะมีน้อยที่สุด
เทคโนโลยีอย่าง Zigbee (2.4 GHz) และ Z-Wave (908.42 MHz) ช่วยให้สามารถสร้างเครือข่ายเมช (Mesh) ที่ใช้พลังงานต่ำได้ ช่วยให้สวิตช์ผนังไม่เพียงแต่ส่งคำสั่ง “ปิด” ไปยังหลอดไฟ แต่ยังรับการยืนยันได้ด้วย โมดูล Z-Wave หนึ่งตัวอาจใช้กระแสไฟ น้อยกว่า 1 mA ในโหมดสลีป และ ~25 mA ระหว่างการส่งสัญญาณ ช่วยให้ทำงานได้ 2-3 ปี ด้วยแบตเตอรี่ก้อนเดียว
| พารามิเตอร์ | รีโมทอินฟราเรด (IR) | รีโมท RF พื้นฐาน (433 MHz) | รีโมท Smart RF (Zigbee/Z-Wave) |
|---|---|---|---|
| ความถี่พาหะ | 333 THz (แสง 940 nm) | 315 MHz / 433.92 MHz | 908.42 MHz / 2.4 GHz |
| อัตราข้อมูลปกติ | ~1.2 kbps | ~2-5 kbps | 40-250 kbps |
| ระยะสูงสุด (แนวสายตา) | 6-8 เมตร | 20-50 เมตร | 30-100 เมตร (ขยายด้วยเมช) |
| การใช้พลังงาน (Tx) | 15-20 mW (สูงสุด) | 5-10 mW (ERP) | ~50 mW (สูงสุด) |
| กรณีการใช้งานหลัก | อุปกรณ์ AV ทั่วไป | ประตูโรงรถ, กุญแจรถ | ระบบบ้านอัจฉริยะ |
| ราคาต่อหน่วย (จำนวนมาก) | 1.00 – 1.80 ดอลลาร์ | 4.00 – 7.00 ดอลลาร์ | 10.00 – 18.00 ดอลลาร์ |
เครือข่ายเมช Zigbee สามารถรองรับ โหนดได้มากกว่า 65,000 โหนด โดยมีความหน่วง (Latency) ประมาณ ~15-30 มิลลิวินาที สำหรับหนึ่งคำสั่ง ชิปเซ็ตวิทยุสำหรับโปรโตคอลเหล่านี้ จากผู้ผลิตเช่น Silicon Labs หรือ Texas Instruments มีราคา 3 – 5 ดอลลาร์ต่อหน่วย เมื่อซื้อจำนวนมาก และรวมโปรเซสเซอร์ ARM Cortex-M 32 บิต ที่ทำงานที่ 40 MHz เพื่อจัดการสแต็กเครือข่ายและตรรกะของแอปพลิเคชัน แม้ว่าการควบคุมผ่านสมาร์ทโฟนจะแพร่หลายมากขึ้น แต่รีโมททางกายภาพโดยเฉพาะยังคงเป็นอินเทอร์เฟซที่ได้รับการปรับแต่งมาอย่างดี เชื่อถือได้ และประหยัดพลังงานสำหรับวัตถุประสงค์เฉพาะ โดยมี การส่งมอบมากกว่า 2 พันล้านเครื่อง ต่อปีสำหรับการใช้งานที่หลากหลาย